Homework
Make sure that you have completed:
- Ex 1, p.25-28, Translational Motion
- Q2, Handout, Lab Exercise
New Homework
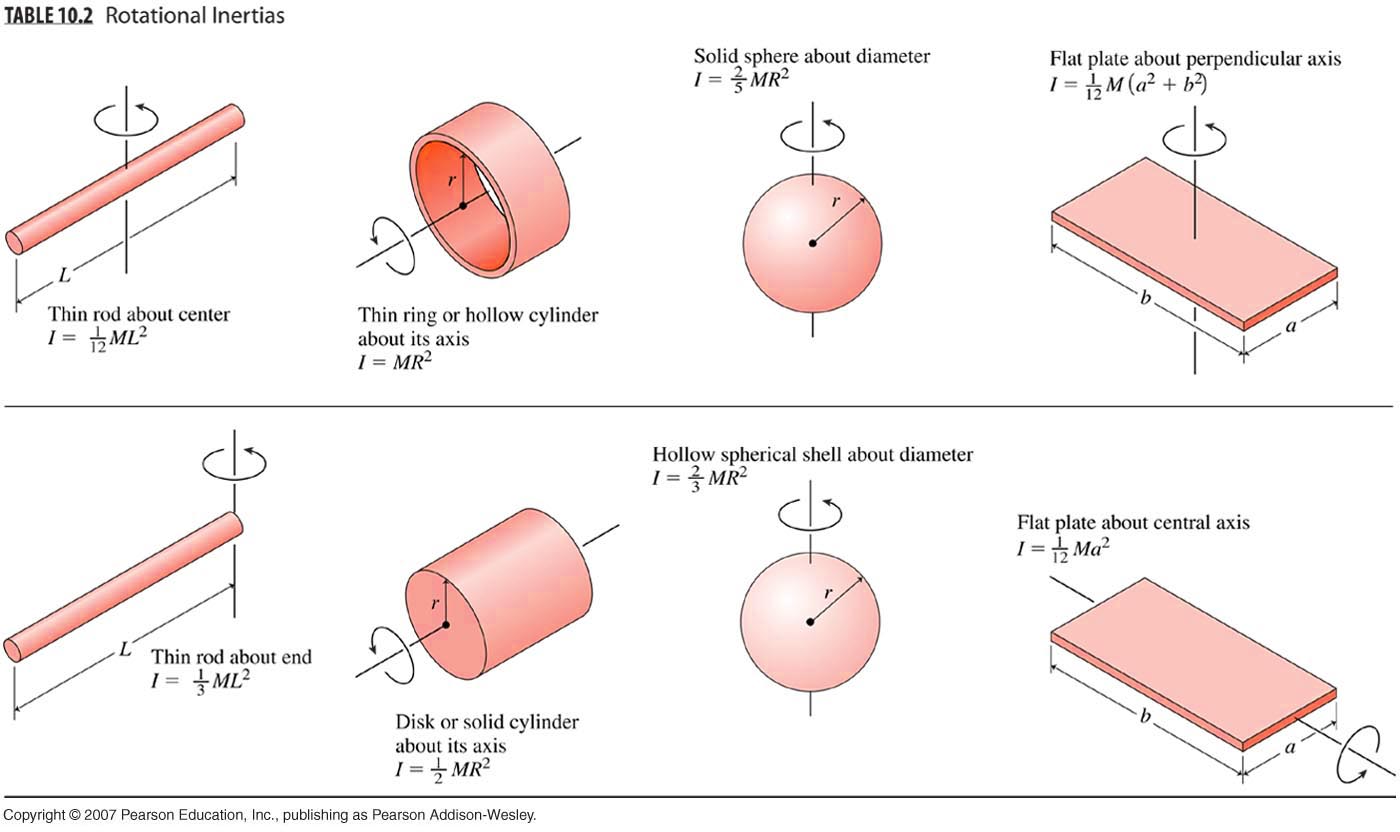
- Ex 2, p. 41-45, Rotational Motion
Rotational Momentum (Angular Momentum)
For a point mass L = Pr
Linear Momentum times the radius distance between the point mass and the axis of rotation

Momentum: Rotational Linear
Equation: L = I⍵ P = mv
Units: kgm2s-1 kgms-1
- Rotational Momentum and Linear Momentum have different units so they cannot be equated with each other and are independent of each other.
- Rotational Momentum obeys the same law of conservation that Linear Momentum obeys. In the absence of outside forces, total momentum is always conserved.
Precession
Egg Spinning
Rotational Kinetic Energy
Energy: Rotational Linear
Equation: Ek(rot) = ½I⍵2 Ek(lin) = ½mv2
Units: Joule Joule
- Rotational Kinetic Energy and Linear Kinetic Energy have the same unit so they can be equated with each other and are interdependent on each other.
- The law of conservation of total energy can be applied with all types of energy. You will be using mostly gravitational potential, linear kinetic, and rotational kinetic energies.
- Total Kinetic Energy = Ek(rot) + Ek(lin)